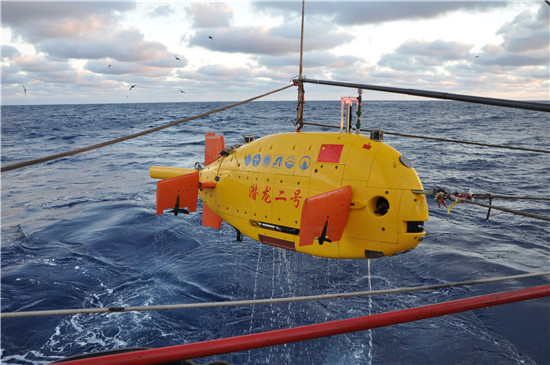
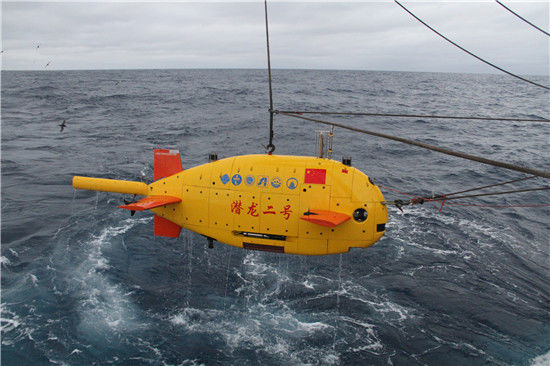
“潜龙二号”AUV
近日,由中国科学院沈阳自动化研究所作为技术总体单位研制的“潜龙二号”AUV圆满完成了中国大洋第40航次试验性应用任务。在本次海上作业中,通过测深侧扫声呐水下实时信号处理技术,“潜龙二号”实现了深海近海底高精细地形地貌快速成图;通过热液活动区热液异常探测和近底光学探测,“潜龙二号”成功发现多处热液异常点,并获得了洋中脊近海底高分辨率照片300多张,取得我国大洋热液探测的重大突破,为我国硫化物矿区的评估、进一步探测及科学研究提供了重要依据。“潜龙二号”西南印度洋试验性应用的成功,填补了我国深海硫化物热液区自主探测技术装备的空白。
海试中

回收至甲板
本次海上作业分为验收试验和试验性应用两个阶段。在第一航段的验收试验中,潜水器共8次下潜,完成了验收试验规定的所有考核项目,同时取得了多项突破性成绩:首次使用我国自主知识产权的AUV进行洋中脊热液区大洋探测任务,获得了断桥、龙旂热液区的近海底精细三维地形地貌数据和磁力数据,同时发现断桥、龙旂热液区多处热液异常点,获得洋中脊近海底高分辨率照片,取得我国大洋热液探测的重大突破。1月29日,863现场验收专家一致同意通过现场验收,这标志着“潜龙二号”最后通过了一项重要的现场考核节点,为后续的试验性应用工作奠定了坚实的技术基础。
在第二航段的试验性应用阶段,“潜龙二号”再接再厉,在共8个潜次的任务中,完成了7个长航程探测任务,累计航程近七百公里,探测面积达218平方公里,测深侧扫数据、磁力探测数据、各种水文环境参数数据均完整有效,同时发现多处热液异常点。其中,单次下潜最大探测时间达到32小时13分钟,最大航行深度超过3200米。本航段“潜龙二号”连续4个长航程成功探测成绩也创下了我国深海AUV之最。
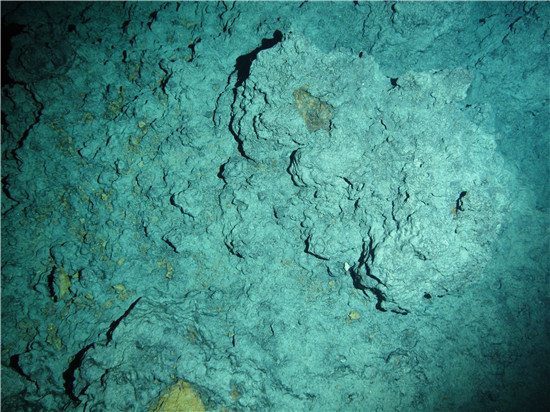
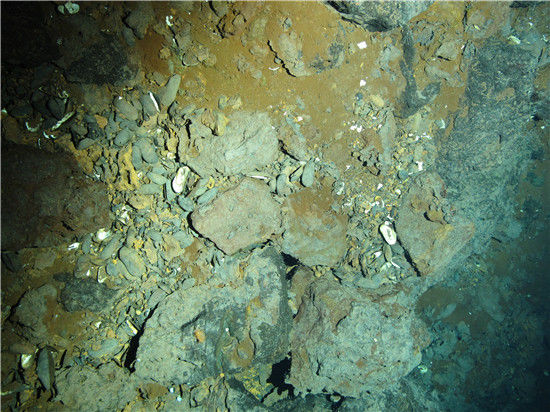
热液区海底硫化物(图中黄色)
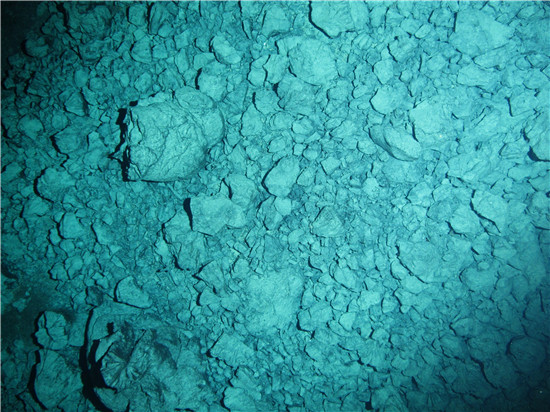
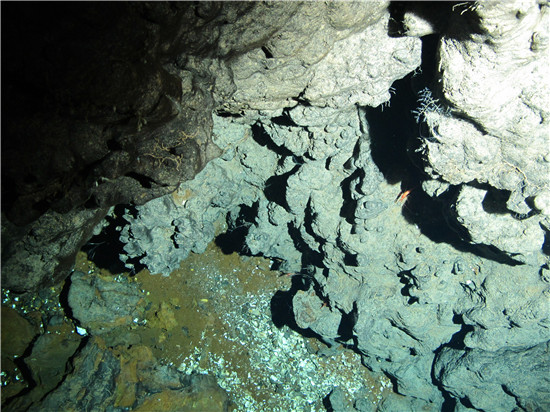
热液区海底玄武岩
热液区海底贝壳
热液区海底生物(小虾)
西南印度洋海上试验再次验证了“潜龙二号”的多项关键技术:首次采用全新非回转体立扁形设计和推进器布局,增强了潜水器的机动性能,实现了复杂海底地形下的稳定航行和路径跟踪能力;首次采用基于前视声纳的避碰控制方法,大大提高了障碍物的有效识别能力,实现了复杂海底地形条件下的有效避碰控制;国内首次在AUV上安装了磁力探测传感器,解决了对磁辐射设备的屏蔽和磁探测数据的校正及处理难题,实现了近海底高精度磁力探测;采用测深侧扫声纳水下实时信号处理技术,实现了深海近海底高精细地形地貌快速成图。研制深远海自主水下机器人,对提升我国深远海资源开发的国际竞争能力,提高我国深远海资源开发利用规模与水平,具有国家战略意义。“潜龙二号”西南印度洋的试验性应用成功,填补了我国深海硫化物热液区自主探测技术装备的空白,必将为我国大洋深海资源调查做出更大的贡献。
照片由中国大洋矿产资源研究开发协会办公室提供

传媒扫描