
“潜龙一号”

“潜龙二号”
据央视新闻联播报道,当地时间1月10日下午,我国自主研发的4500米级自主水下机器人——“潜龙二号”,在西南印度洋成功下潜至1600米指定位置,在复杂的海底环境下自主航行作业,获得了这个区域的精细海底地形地貌图,实现了它在洋中脊海底的首次勘探。
另据中国网报道,2016年伊始,“向阳红10”号远洋科学考察船也迎来了它的“船生”第一次大洋任务。本次大洋航次,“向10”一项重要任务即搭载“潜龙二号”前往西南印度洋多金属硫化物作业区,带着4500米级AUV(即“潜龙二号”,4500米级深海资源自主勘查系统)进行它应用前的“终极考试”——西南印度洋多金属硫化物矿区的试验性应用海试。今天,“潜龙二号”执行了它在目的地海域的处女航。
“潜龙二号”是我国863计划深海技术与装备重大项目的研究课题之一。记者从该课题负责人中国大洋协会办公室李波处获悉,“潜龙二号”是由中国大洋协会牵头,中国科学院沈阳自动化研究所作为技术总体单位,联合国家海洋局第二海洋研究所等参研单位共同研制的4500米级深海资源自主勘查系统。
2015年12月16日,执行我国第四十航次科考任务的“向阳红10号”起航,两台4500米级深海水下机器人“潜龙一号”和“潜龙二号”随船出发,首次投入实质性远洋科考。
为了最大限度地提高科研效率、节约科研经费,大洋40航次的调研队员正式开始了“昼夜不分、黑白颠倒”的生活,AUV(4500米级深海资源自主勘查系统)组、热液异常探测组、地球物理组、地质组、综合作业组、甲板保障组等调研组长充分考虑了可能出现的一切意外情况,均制定了稳妥的值班表,确保每一个时间段、每一间实验室都有至少一人在值班、巡查。考虑到宣传报道组的工作性质,“向阳红10”船的2名随船记者、1名随船摄像也安排了值班任务,在数据记录等方面的工作内容上挑起了大梁。
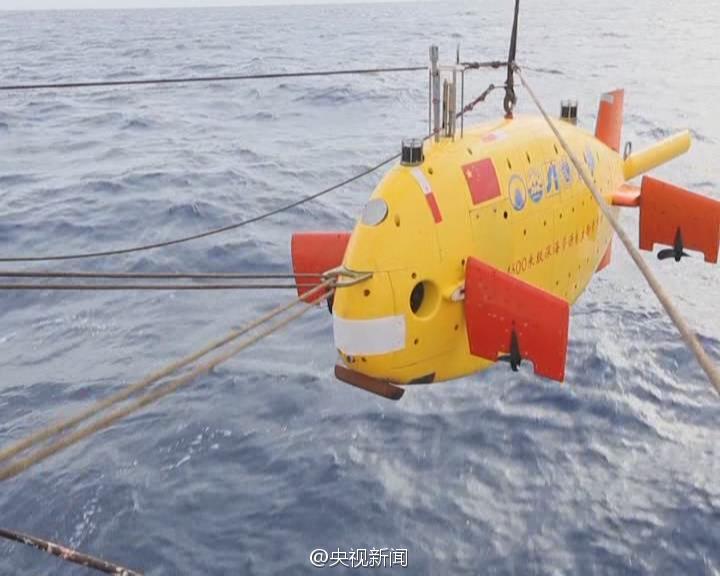
经过9日一天的布阵、测阵及10日天一大早的准备工作,“潜龙二号”的处女航已经全部准备就绪,以往没有安装的磁力仪也已安装完毕,呈现出它最完整的优雅姿态,阳光下的“潜龙二号”显得典雅又美丽。当地时间早上8点,在止荡绳的牵引下,“潜龙二号”缓缓由“向阳红10”船的后甲板没入水中,入水后的“潜龙二号”开始有了自主“行动力”,只见一条黄色的“胖鱼”迅速向下“游”去,很快,“胖鱼”变成了一个黄色的小点,消失在视野范围之内。
“潜龙二号”的副总设计师赵宏宇告诉记者,9日的准备阶段,就是在为“潜龙二号”设置“卫星导航”的阶段。由科研人员下放四个应答器,由超短基线对四个应答器进行位置标定,谓之“测阵”。每个应答器之间距离大约为3公里,被辐射到的区域皆将成为“潜龙二号”的导航区域,AUV可以向应答器发射信号,通过接收到的讯息来判定自己所在的具体位置,从而进行梳形搜索。此外,随“潜龙二号”下水的还有一台声波通讯机,声通讯机与AUV之间达成“沟通”,再由声通讯机将“沟通结果”发送给船上的科研人员,以此达到实时监控的作用。今天一天,“潜龙二号”的探测任务包括了海底地形地貌探测、热液异常探测、磁力探测等内容。
“潜龙二号”在水中探测了9个小时左右时间,当地时间下午6时左右,它自动抛载上浮于“向10”船的南面,距离船体还有一定距离。在“向10”及4500米级AUV缓缓靠近的过程中,首先映入眼帘的是几只信天翁,它们新奇地“盯着”这台巨大的黄“鱼”,不停地用嘴啄。“嘭”的一声巨响,“潜龙二号”抛出一条橘红色牵引绳,再由科研人员发射一条打捞绳,两根绳系好“水手结”,慢慢让AUV浮至船尾,至此,回收工作的第一步告一段落。紧接着,科研人员用钩子分别给“潜龙二号”的牵引环套上止荡绳,缓缓用A架将“潜龙二号”吊起,重新固定在后甲板上。
在“潜龙二号”下放及回收过程中,“向10”船边一直有数十只海鸟盘旋在侧,好奇地观看。记者猜想,“潜龙二号”此后的探秘之旅一定不会孤独,因为它有海鸟这般“朋友”、有科研队员这般“父母”、有863计划这般任重道远的“灯塔”、还有殷切希望它出色完成作业任务的我们。将“潜龙二号”回收完毕的瞬间,天边出现了一道完整的彩虹,在海天一色的远方显得尤为美丽。

传媒扫描