预测结果与海试数据对比
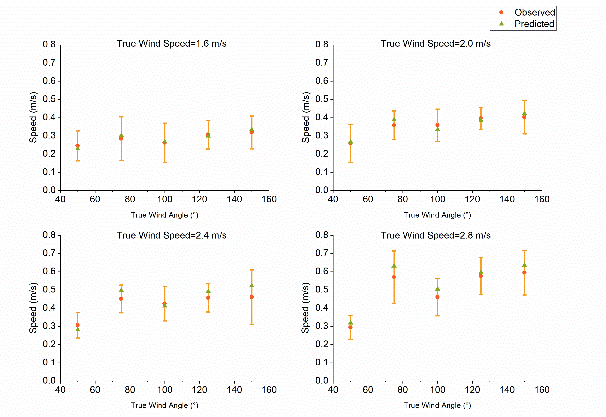
“海鸥”号无人帆船航速性能预测结果
近日,中国科学院沈阳自动化研究所海洋机器人前沿技术中心研发团队在无人帆船设计方面研究取得新进展。相关成果以Towards a General Design Evaluation Tool: The Development and Validation of a VPP for Autonomous Sailing Monohulls为题发表在海洋工程领域期刊Applied Ocean Research上。
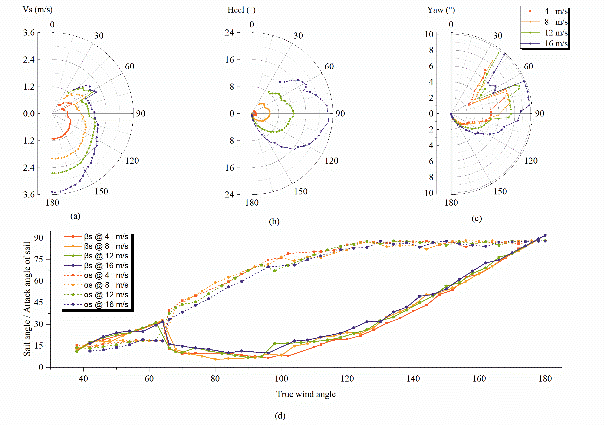
航行速度是单体无人帆船的一个重要性能指标,它对无人帆船在海洋科学任务中的区域通过性、水团跟踪能力和观测效率有较大影响。由于单体无人帆船的船体和龙骨的设计通常基于任务需求,采用传统的、基于经验公式和梯度求解器的速度预测程序(VPPs)来估计速度性能会导致较大的误差。科研人员提出了一种通用的VPP,用于帮助设计者在设计初始阶段有效的评估特定设计在各种风力条件下的速度性能。科研人员一是创新性地开发了一个增强的遗传算法(GA)求解器,用来帮助VPP在没有先验性能估计的情况下快速收敛;二是创新性地提出了一个基于邻域信息的优化(NIBO)策略,在独立预测每个外界条件下的性能后,进一步利用相邻状态(相同的真风速或真风角)的邻域信息加速和优化速度预测过程。基于“海鸥号”无人帆船的数值仿真和试验证明,该方法可以作为一个有效的无人帆船设计评估工具。
沈阳自动化所海洋机器人前沿技术中心研发团队自2018年起对面向海洋观测的无人帆船的航行机理、设计与优化等问题展开基础性研究,并研发出一型样机“海鸥号”。相关论文发表在海洋工程领域期刊Ocean Engineering和Applied Ocean Research上。
该系列研究得到了国家自然科学基金、辽宁省自然科学基金等大力支持。